

Sydney used drone monitor several kilometers of water pipelines. Thanks to drones and large amounts of data, this company has made this task easier. 80% of Australia's largest city's water is transported by two pipes laid on the ground through a dam built in the narrow gorge of the Wallagamba River.
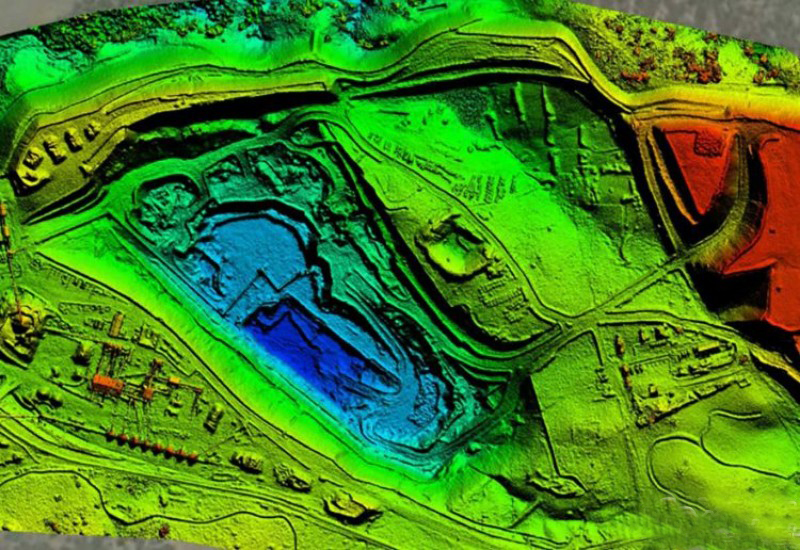
"We ended up with 118,000 photos, and all of them were just over 20 megapixels," Rennie said. "We are talking about terabytes of data." All of this data is used to create a 3D model of the entire length of the pipe, which is accurate to the sub-millimeter level. "In hindsight, it was a bit crazy," Rennie said. "The real technical challenge of this project is the amount of data. Therefore, there are not too many projects of this size. It is very valuable to be able to absorb a large amount of data and produce something very useful to customers."
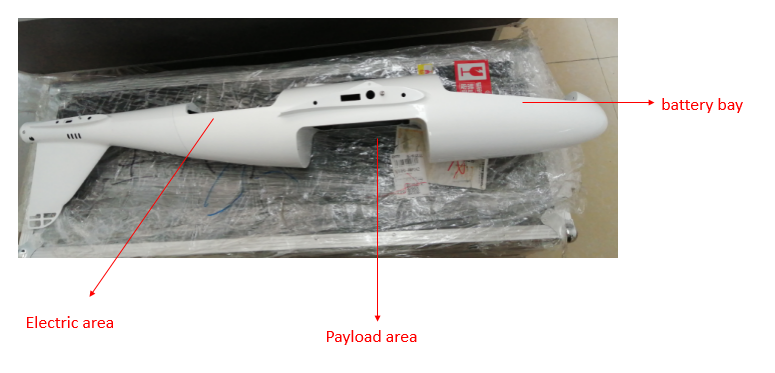
FDG25 long endurance drone with vertical take-off and landing fixed wing, wingspan 2.5 meters,it iss electric version . This model combines the characteristics of long-endurance, high-speed and long-distance of fixed-wing UAVs and the vertical take-off and landing of rotor-wing drones. The fuselage is designed as quick release structure, with reliable electrical connection, plug and play; unfolding and withdrawal time is less than 10 minutes. The engine is rear-mounted and the load is placed forward to provide a larger field of view for the photoelectric load without obstruction.
Feature:
Easy to assemble and operate Vertical take-off and landing, without limitation of space Resistance to harsh weather conditions Diesel-electric version and electric version optional All carbon fiber composite material, industry standard architecture Compatible with PC station, suitable for open source of autopilot system.
1. Body material: carbon fiber, glass fiber, Kevlar, pvc interlayer, etc. Recommended Set-up:
4 x T-motor MN505S KV260 NOTE: THE PRICE IS JUST KIT, WITHOUT ANY ELECTRONIC, AND THE PACKING IS IN WOODEN CASE
FlyDragon FDG25 fixed -wing vtol for pipe inspection
long endurance drone 3 hours VTOL V tail for mapping surveillance
2. Body length: 1.26m
3. Wingspan: 2.5m
4. Landing gear height: 19.5cm
5. Landing gear installation position: below the rotor rod
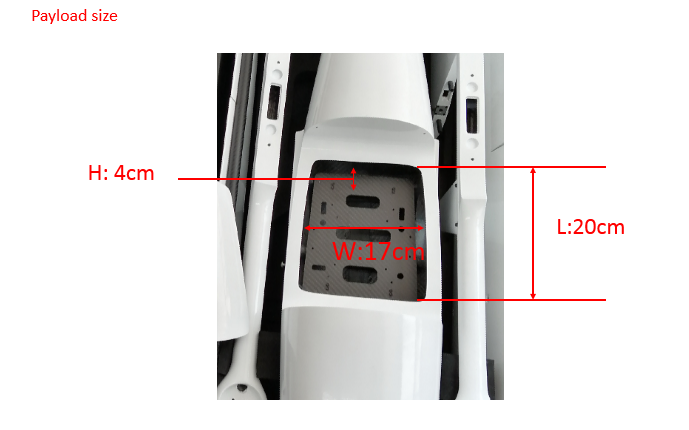
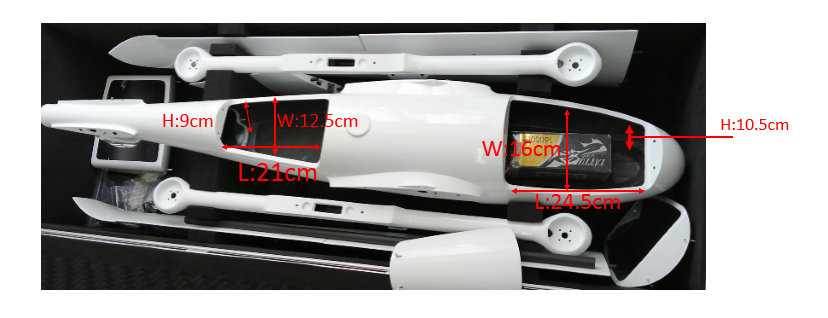
6. Task compartment size: 260mm*172mm*90mm
7. Battery compartment size: 260mm*150mm*85mm (can hold 2*5300mah and 1*32000mah at the same time)
8. Position of mission compartment: directly below the center of gravity of the aircraft
9. Structure weight: about 3.2kg
10. Maximum take-off weight: less than 13kg
11. Maximum payload: 2kg (standard load: 1-1.5kg)
12. Endurance time: 170min/1.5kg, 210mim/1.2kg
13. Maximum control distance: manual control by remote control/1km, ground station/standard 30km
14. Standard cruising speed: 65km/h (about 18m/s)
15. Maximum cruising speed: 108km/h (30m/s)
16. Stall speed: 16m/s
17. Minimum circling radius: 150m
18. Maximum level flight limit: 4000m above sea level
19. Wind resistance of fixed-wing mode: no less than 7 wind (17.1m/s)
20. Maximum wind resistance in rotor take-off and landing mode: no less than class 4 wind (7.9m/s)
21. Operating environment: -20℃~45℃; can fly in light rain
22. Power battery: 2*5300mah (vertical take-off and landing) 2*25000mah (fixed wing cruise)
23. Rotor emergency operation time: not less than 6.5min
24. Take-off and landing method: vertical take-off and landing
25. Vertical power blade size: 16 inches (recommended)
26. Fixed wing tail thruster blade: 14~16 inches (recommended)
4 x T-motor 6S 60A ESC
2 x P16*5.4 Propeller CW&CCW
1 x T-motor AT115A ESC
1 x T-motor AT4130 KV230
1 x APC 17″ Propeller CW
4 x GDW296X servo
1 x PX4 Air Speedometer
1 x Power Module For Pixhawk 2.1
1 x Pixhawk 2.1 Standard Set with Here 2 GNSS
1 x Herelink
2 x 6S 25000mAh Lipo battery







Contact: Fly Dragon Drone Tech.
Email: frank at dronefromchina.com
Add: NO. 9 Dayu Road PiDu distric, ChengDu 611730, China