What is drone GPS positioning principle?

1. Drone GPS positioning method
According to the d
rone GPS positioning method: single point positioning, relative positioning (differential positioning)
According to the movement state of the receiver: dynamic positioning, static positioning
1.1, absolute positioning (single point positioning)
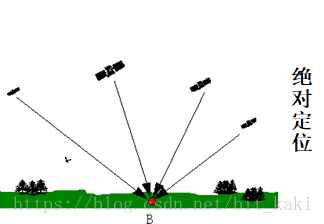
Absolute position, that is, absolute coordinates in a coordinate system
1.2, relative positioning (differential positioning)
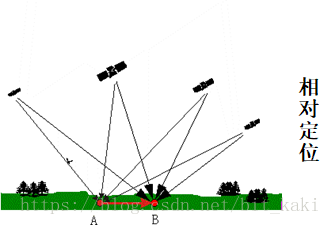
Baseline vector, which is the coordinate difference between two points for simultaneous observation
Before understanding differential GPS, we must first know three types of errors in GPS positioning measurement:
1. The public error of the receiver: satellite clock error, ephemeris error, ionosphere error, and process error;
2. Errors in the receiver itself: internal noise, channel delay, multipath effects;
3. Propagation delay error between the base station receiver and the rover receiver;
The above three types of errors are the three main types of errors in GPS measurements, and the first type of receiver public errors can be completely eliminated by differential techniques. The second type of error is the inherent error of the hardware device, which cannot be eliminated. The third type of error directly depends on the distance between the mobile station and the base station.
The so-called differential GPS, the basic composition of which includes a known ground control point, a ground reference station, and a mobile station in the measurement area. The working principle is to pass through a certain area (based on different measurement levels, the reference station and the mobile station The distance is different, generally less than 25km), set up a GPS reference station on the ground known control point, the GPS reference station records GPS positioning information in real time, and compares with the actual coordinate value of the ground known control point , To obtain the correction amount of the mobile station in the measurement area by calculation, so as to correct the measurement value of the mobile station to obtain a more accurate measurement value.
According to the difference calculation sequence, it can be divided into two types: post-difference and real-time difference. The post-difference means that the reference station stores the recorded differential data, and waits for the data of the mobile station according to the corresponding time period and time point after the entire measurement is completed Differential processing, real-time differential refers to the reference station through the radio station, real-time transmission of differential data to the mobile station, in order to achieve real-time data calculation.
In addition, differential GPS can be divided into three types according to the difference information sent by the reference station, which are position difference technology, pseudo-range difference technology in distance difference, and carrier phase difference technology (Real Time Kinematic, and RTK) in distance difference. .
Position difference technology:
Refers to the reference station directly sending the difference between the real value and the measured value as a differential correction amount to the user receiver for direct calculation and correction, which can eliminate the first type of error (that is, satellite clock difference, star Calendar error, ionospheric error, and process error, etc.), that is, the difference of coordinates is used as a correction amount to directly add or subtract from the measured value of the mobile station.
Pseudo-range difference technology in distance difference:
First of all, we must understand the concept of pseudorange. The so-called pseudorange is the actual measured distance A and real distance B between the satellite and the receiver in the actual GPS measurement process. Due to the satellite clock difference, receiver clock difference, and ionospheric delay, etc. , Causing errors, so the actual ranging value A is called pseudorange, and GPS receiver measurement is also called pseudorange measurement. Therefore, for the pseudo-range differential technology, it can be understood that the correction amount of the pseudo-range measurement is passed as a correction value to the mobile station for differential processing.
Position difference and pseudo-range difference can cancel out the first type of error, but the increase in the distance between the mobile station and the reference station increases the transmission delay of the system data. This cannot be eliminated.
The principle of carrier phase difference in distance difference is RTK technology
The carrier phase difference method can actually be divided into two types:
The first is that the reference station transmits the correction amount of the carrier phase to the mobile station, and the mobile station performs difference decomposition calculation based on this correction amount to obtain its own three-dimensional coordinates, which is a method of mobile station coordinate correction.
The second is that the reference station transmits the measured carrier phase observations, pseudorange observations, reference station coordinates and other information to the mobile station in real time through the radio station. The mobile station performs differential processing on the carrier phase observations to obtain the reference The baseline vector between the station and the mobile station (baseline vector refers to the coordinate difference between the two stations, δx, δy, δz), and then obtain the coordinates of the mobile station according to the coordinates of the base station control point, the resulting mobile station is WGS- 84 coordinates.
airplane autopilot NEW V5 with twoGPS

airplane autopilot Quick Summary
Main FMU Processor: STM32F765
32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
IO Processor: STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
On-board sensors:
Accelerometer/Gyroscope: ICM-20689
Accelerometer/Gyroscope: BMI055
Magnetometer: IST8310
Barometer: MS5611
Interfaces:
8-14 PWM outputs (6 from IO, 8 from FMU)
3 dedicated PWM/Capture inputs on FMU
Dedicated R/C input for CPPM
Dedicated R/C input for PPM and S.Bus
analog / PWM RSSI input
S.Bus servo output
5 general purpose serial ports
4 I2C ports
4 SPI buses
2 CANBuses with serial ESC
Analog inputs for voltage / current of 2 batteries
Power System:
Power: 4.3~5.4V
USB Input: 4.75~5.25V
Servo Rail Input: 0~36V
Weight and Dimensions:
Weight: 90g
Dimensions: 85.5*42*33mm
airplane autopilot Other Characteristics:
Operating temperature: -20 ~ 80°c(Measured value)



